

今天早报提到了一辆谷歌无人驾驶汽车与公交车相撞的新闻,笔者找到了车辆管理局 (DMV) 出具的事故报告,仔细阅读之后发现,谷歌无人驾驶汽车实在是蠢得可以——至少在这次事故中是这样。
事故发生在上个月 14 日,距离今天已经过去了半个月,这个时候才有媒体报道出来。事故涉及一辆注册在 Google Auto LLC 公司下的 2012 年款 Lexus RX450h,另一辆公交是 2002 年款的 Newflyer Lowfloor Articulated Bus (2300 系列)。报告显示,事故发生时,两辆车均在移动状态,且 RX450h 处于无人驾驶状态 (Autonomous Mode)。

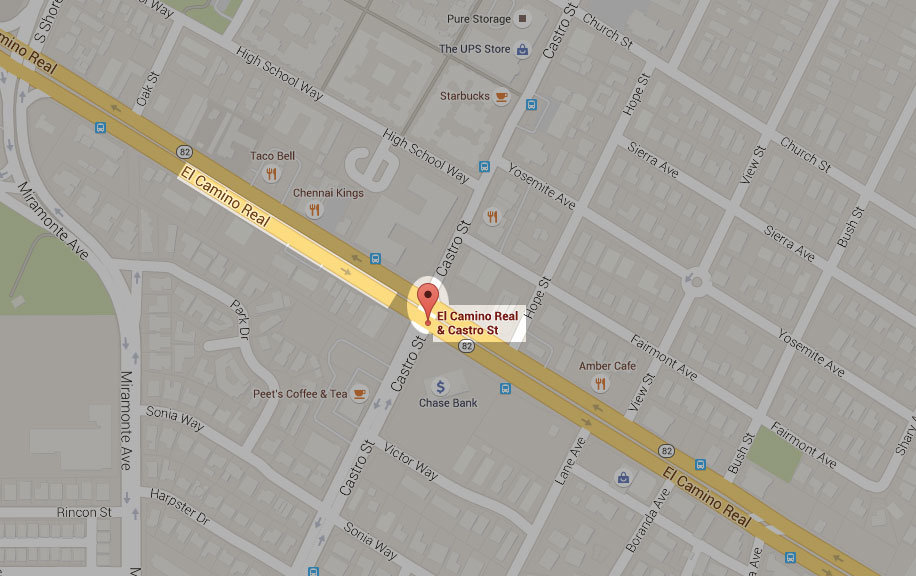
事故发生地点,是加州山景城的 El Camino Real 和 Castro St 交口。事故报告显示,由谷歌试驾司机操作的 RX 450h 在无人驾驶状态下沿 El Camino Real 右侧车道自西向东行驶,在接近十字路口时,打右转向灯,驶入右侧车道。此时 Castro St 路口交通灯为红灯,于是 RX 450h 在车道右侧准备超过其他在直行道上等红灯的车。
但是谷歌无人驾驶汽车发现行驶路线被一些沙袋阻挡,于是停了下来,准备绕过去。这个时候交通灯变绿,直行车辆纷纷从旁侧超过谷歌无人驾驶汽车。在几辆直行车辆驶过之后,谷歌无人驾驶汽车准备换回直行车道,绕过沙袋。
这个时候另一辆事故车公交大巴沿直行车道开来,坐在驾驶员座位上的谷歌试驾司机认为大巴车会停下,让谷歌无人驾驶汽车完成换道。大概三秒钟之后 (注意,这个时间很重要),谷歌无人驾驶汽车重新回到直行车道,并与驶来的公交车相撞。碰撞发生时,谷歌无人驾驶汽车的行驶速度不到每小时两英里,公共汽车的行驶速度约为每小时 15 英里。这起事故没有造成人员伤亡,谷歌无人驾驶汽车的左前方挡泥板、车轮以及其中的一个传感器被损坏。
也就是说,谷歌无人驾驶汽车在换车道行驶时,车的左前部撞到了正常行驶的大巴车。
有媒体指出,这是谷歌无人驾驶汽车由于自身犯错误而引发的事故。的确如此,陈述了事故经过之后,我们来简单分析一下:首先,换道车应该视路面情况,优先为正常行驶的汽车让行,这基本是国际惯例。因为换道车的行驶路线,影响了本来正常行驶车的前进路线。这一点和“小路让大路,转弯让直行”的道理是一样的,小路出大路需要并到大路行驶,所以要让行大路正常行驶车辆。
正常行驶的汽车看到换道车的转向灯,如果愿意让出车道的话,通常会减速,这样换道车就可以并入车道。这也是上文描述的情况,谷歌试驾司机认为公交车会减速,让谷歌无人驾驶汽车并入直行车道,公交车司机也是这么做的,将速度降至 15 英里/小时。这个时候,任何一个正常的司机只要转一下方向盘,轻踩油门,并道就完成了。
谷歌无人驾驶汽车没有,它在以不到每小时两英里的速度磨蹭着并入直行道——不要因为低车速而误判,不是速度越低越好,有时候车速越慢反而越危险!
事故报告中提到了一个很重要的数据,就是从谷歌试驾司机看到大巴车到事故发生时经过了三秒钟。不要认为三秒钟是一个很短的时间,大部分的路口调头都不需要三秒钟时间,城区路况正常的换车道驾驶连两秒钟都不用。而且 El Camino Real 是山景城少有的不拥挤、路况不复杂的街道,三秒钟是很长的一段驾驶距离。
如果你是大巴司机,已经把车速降至 15 英里/小时,但是打着转向灯的并道车始终以奇慢的速度在一点一点地移近你所行驶的车道,你会怎么想?大部分可能会想,莫非前车司机是想让我先过?那我就先过吧。在这种情况下,即便发生了事故,前车 (谷歌无人驾驶汽车) 应该负主要责任。大巴司机减速正常行驶没有问题。
试想一下,你已经给前车足够的并道时间,而自己在本来的车道正常行驶,难道要急刹车等前车以 2 英里/小时的速度完成并道不成?如果急刹车导致后车追尾怎么办?保持 15 英里/小时的低车速开过去,这是稳妥、安全的次优选择——谁让咱遇到了又蠢又笨的谷歌无人驾驶汽车呢?
智能界(www.znjchina.com)中国智能科技聚合推荐平台,秉承“引领未来智能生活”的理念,专注报道智能家居、可穿戴设备、智能医疗、机器人、3D打印、智能汽车等诸多科技前沿领域。聚合品牌宣传、代理招商、产品评测、原创视频、FM电台与试用众测,深入智能硬件行业,全平台多维度为用户及厂商提供服务,致力成为中国最具影响力的智能硬件聚合推荐平台。